

The rhizodynamics robot: Automated imaging system for studying long-term dynamic root growth
- PMID: 38128010
- PMCID: PMC10734993
- DOI: 10.1371/journal.pone.0295823
The rhizodynamics robot: Automated imaging system for studying long-term dynamic root growth
Abstract
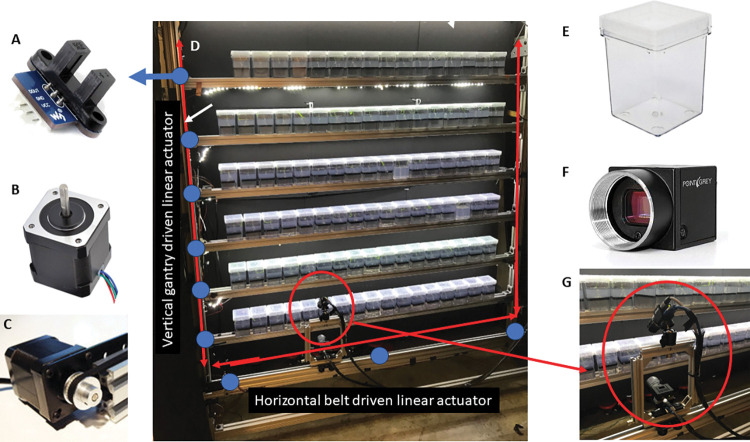
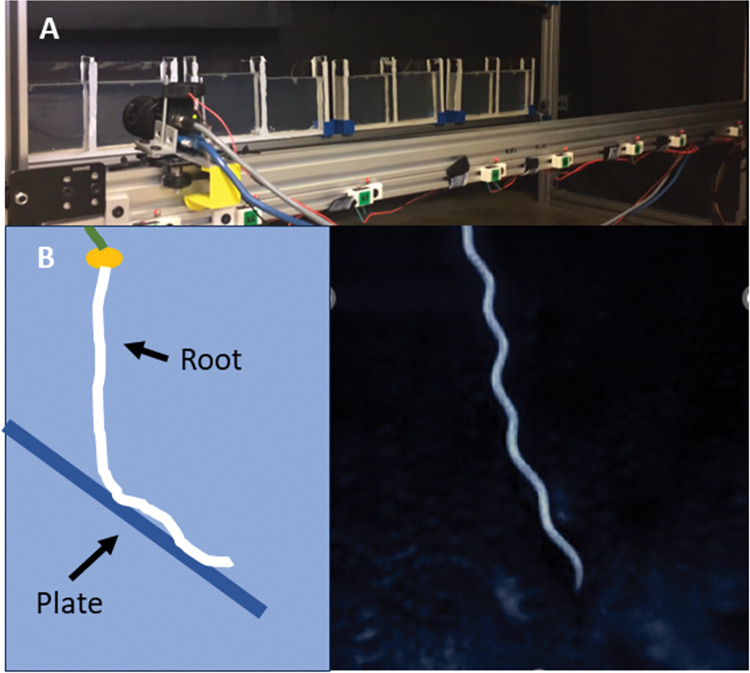
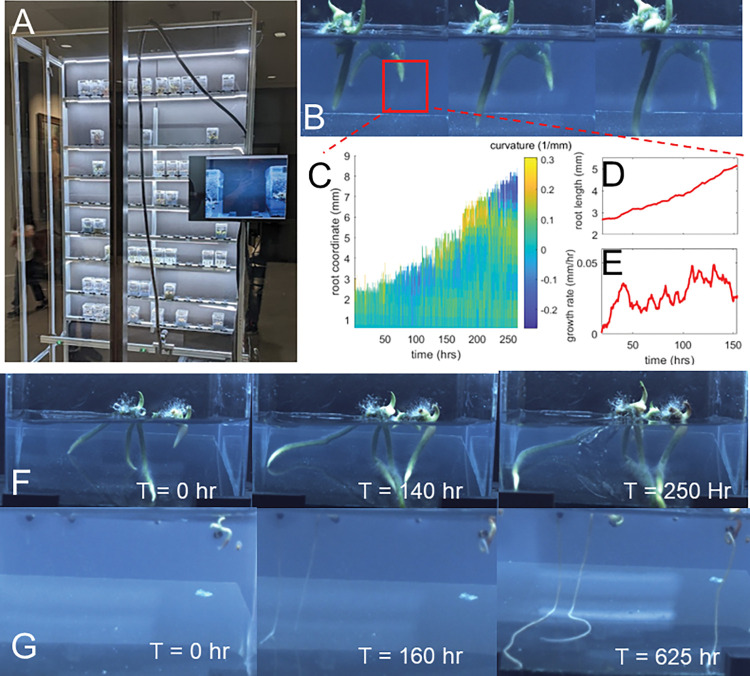
The study of plant root growth in real time has been difficult to achieve in an automated, high-throughput, and systematic fashion. Dynamic imaging of plant roots is important in order to discover novel root growth behaviors and to deepen our understanding of how roots interact with their environments. We designed and implemented the Generating Rhizodynamic Observations Over Time (GROOT) robot, an automated, high-throughput imaging system that enables time-lapse imaging of 90 containers of plants and their roots growing in a clear gel medium over the duration of weeks to months. The system uses low-cost, widely available materials. As a proof of concept, we employed GROOT to collect images of root growth of Oryza sativa, Hudsonia montana, and multiple species of orchids including Platanthera integrilabia over six months. Beyond imaging plant roots, our system is highly customizable and can be used to collect time- lapse image data of different container sizes and configurations regardless of what is being imaged, making it applicable to many fields that require longitudinal time-lapse recording.
Copyright: © 2023 Rajanala et al. This is an open access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
Similar articles
-
Multi-chamber petaloid root-growth chip for the non-destructive study of the development and physiology of the fibrous root system of Oryza sativa.Lab Chip. 2019 Jul 21;19(14):2383-2393. doi: 10.1039/c9lc00396g. Epub 2019 Jun 12. Lab Chip. 2019. PMID: 31187104
-
High-throughput two-dimensional root system phenotyping platform facilitates genetic analysis of root growth and development.Plant Cell Environ. 2013 Feb;36(2):454-66. doi: 10.1111/j.1365-3040.2012.02587.x. Epub 2012 Sep 3. Plant Cell Environ. 2013. PMID: 22860896
-
Long-Term Confocal Imaging of Arabidopsis thaliana Roots for Simultaneous Quantification of Root Growth and Fluorescent Signals.Methods Mol Biol. 2017;1610:169-183. doi: 10.1007/978-1-4939-7003-2_12. Methods Mol Biol. 2017. PMID: 28439864
-
Phenotypes and Molecular Mechanisms Underlying the Root Response to Phosphate Deprivation in Plants.Int J Mol Sci. 2023 Mar 7;24(6):5107. doi: 10.3390/ijms24065107. Int J Mol Sci. 2023. PMID: 36982176 Free PMC article. Review.
-
Deconstructing the root system of grasses through an exploration of development, anatomy and function.Plant Cell Environ. 2022 Mar;45(3):602-619. doi: 10.1111/pce.14270. Epub 2022 Feb 14. Plant Cell Environ. 2022. PMID: 35092025 Free PMC article. Review.
References
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Research Materials
