

Coupling cell shape and velocity leads to oscillation and circling in keratocyte galvanotaxis
- PMID: 36397670
- PMCID: PMC9822803
- DOI: 10.1016/j.bpj.2022.11.021
Coupling cell shape and velocity leads to oscillation and circling in keratocyte galvanotaxis
Abstract
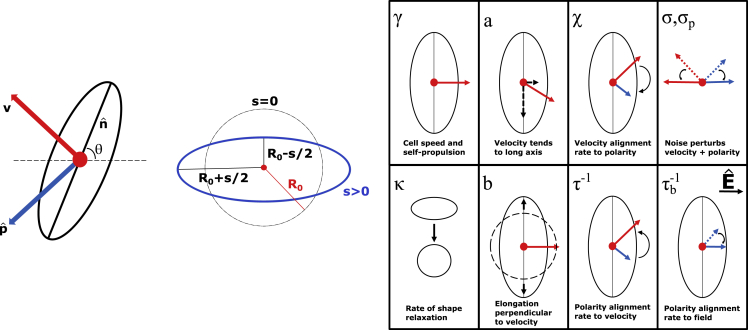
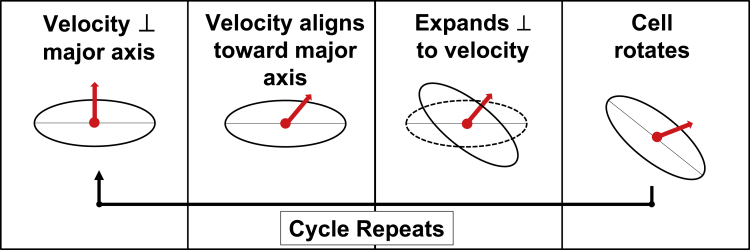
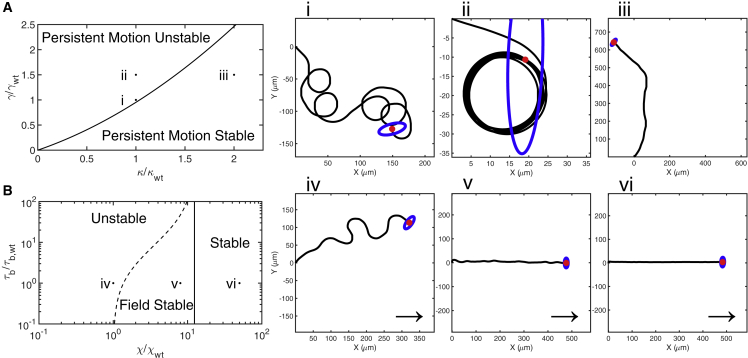
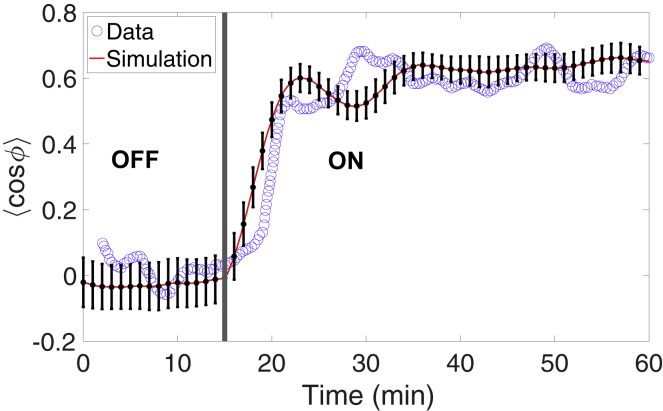
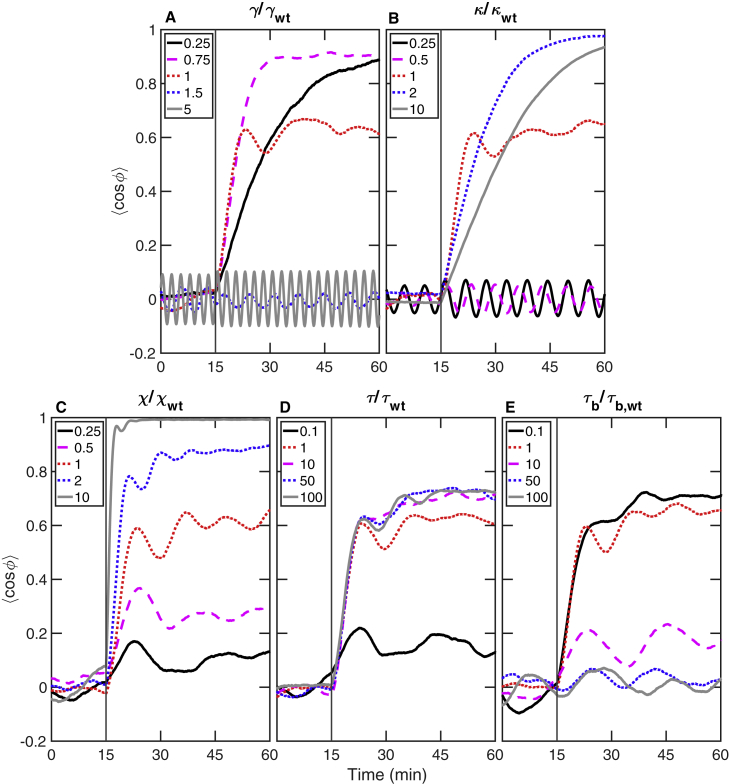
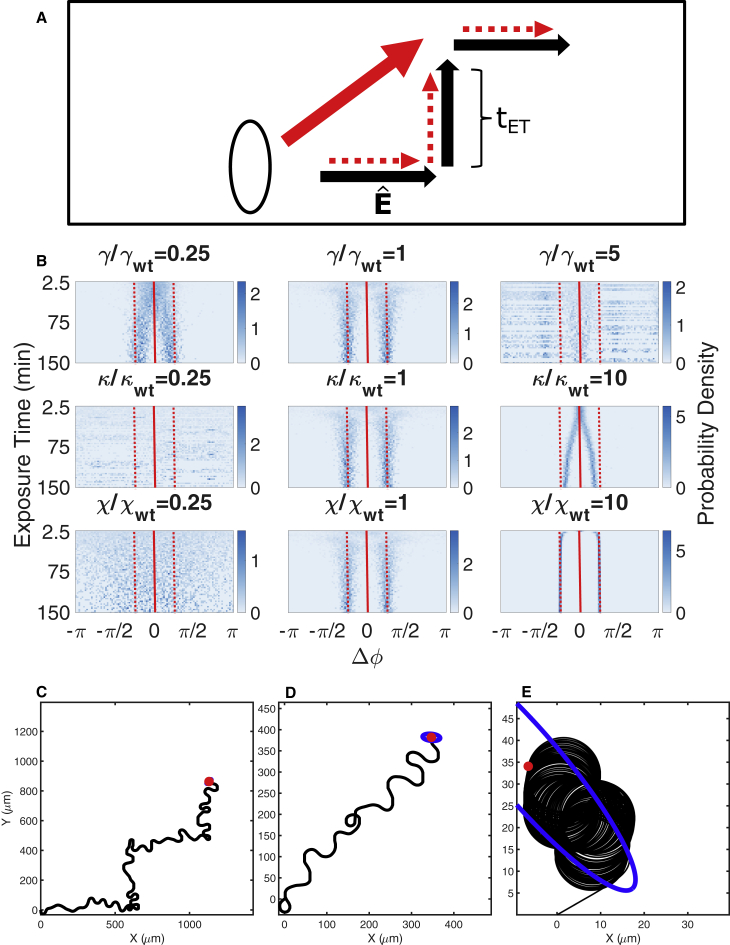
During wound healing, fish keratocyte cells undergo galvanotaxis where they follow a wound-induced electric field. In addition to their stereotypical persistent motion, keratocytes can develop circular motion without a field or oscillate while crawling in the field direction. We developed a coarse-grained phenomenological model that captures these keratocyte behaviors. We fit this model to experimental data on keratocyte response to an electric field being turned on. A critical element of our model is a tendency for cells to turn toward their long axis, arising from a coupling between cell shape and velocity, which gives rise to oscillatory and circular motion. Galvanotaxis is influenced not only by the field-dependent responses, but also cell speed and cell shape relaxation rate. When the cell reacts to an electric field being turned on, our model predicts that stiff, slow cells react slowly but follow the signal reliably. Cells that polarize and align to the field at a faster rate react more quickly and follow the signal more reliably. When cells are exposed to a field that switches direction rapidly, cells follow the average of field directions, while if the field is switched more slowly, cells follow a "staircase" pattern. Our study indicated that a simple phenomenological model coupling cell speed and shape is sufficient to reproduce a broad variety of different keratocyte behaviors, ranging from circling to oscillation to galvanotactic response, by only varying a few parameters.
Copyright © 2022 Biophysical Society. Published by Elsevier Inc. All rights reserved.
Conflict of interest statement
Declaration of interests The authors declare no competing interests.
Figures
Similar articles
-
Keratocyte fragments and cells utilize competing pathways to move in opposite directions in an electric field.Curr Biol. 2013 Apr 8;23(7):569-74. doi: 10.1016/j.cub.2013.02.026. Epub 2013 Mar 28. Curr Biol. 2013. PMID: 23541726 Free PMC article.
-
Physical limits on galvanotaxis.Phys Rev E. 2023 Dec;108(6-1):064411. doi: 10.1103/PhysRevE.108.064411. Phys Rev E. 2023. PMID: 38243498
-
Cell shape and orientation control galvanotactic accuracy.Soft Matter. 2024 Nov 13;20(44):8866-8887. doi: 10.1039/d4sm00952e. Soft Matter. 2024. PMID: 39479920
-
Cellular mechanisms of direct-current electric field effects: galvanotaxis and metastatic disease.J Cell Sci. 2004 Apr 1;117(Pt 9):1631-9. doi: 10.1242/jcs.01125. J Cell Sci. 2004. PMID: 15075225 Review.
-
Experiment, theory, and the keratocyte: An ode to a simple model for cell motility.Semin Cell Dev Biol. 2020 Apr;100:143-151. doi: 10.1016/j.semcdb.2019.10.019. Epub 2019 Nov 9. Semin Cell Dev Biol. 2020. PMID: 31718950 Review.
Cited by
-
Migration and division in cell monolayers on substrates with topological defects.Proc Natl Acad Sci U S A. 2023 Jul 25;120(30):e2301197120. doi: 10.1073/pnas.2301197120. Epub 2023 Jul 18. Proc Natl Acad Sci U S A. 2023. PMID: 37463218 Free PMC article.
References
-
- Kunzenbacher I., Bereiter-Hahn J., et al. Weber K. Dynamics of the cytoskeleton of epidermal cells in situ and in culture. Cell Tissue Res. 1982;222:445–457. - PubMed
-
- Keren K., Julie A.T. Cell Motility. Springer; 2008. Biophysical aspects of actin-based cell motility in fish epithelial keratocytes; pp. 31–58.
-
- Radice G.P. Locomotion and cell-substratum contacts of xenopus epidermal cells in vitro and in situ. J. Cell Sci. 1980;44:201–223. - PubMed
-
- Du Bois-Reymond E. 1849. Untersuchungen über tierische Elektrizität.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
