v1_0_0
We do not recommend this project to be used yet. It is only in its beginning stages and does risk failure.
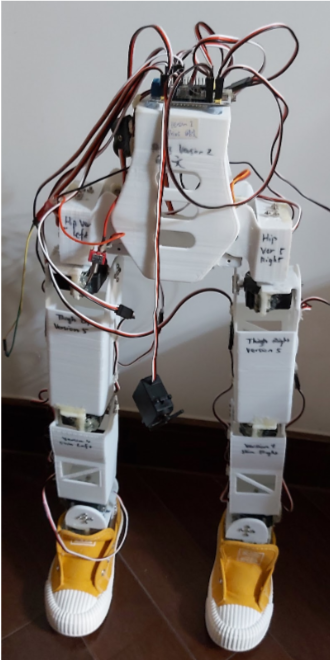
Anodroid is a 10-DOF humanoid-robot. It is an integrated machine that can move around in flat and tilted surfaces. It consists of:
- 15 single axis model motors. 12 needed, 3 for backup
- 24 Circular rotating shafts for the motors, 12 needed, 12 for backup
- 70 M3*7 screws and nuts, 60 needed, 10 for backup
- 20 sets of axial motor equipments, including an M3*10 screw, a rotating axis, and an M3 nut
- 70 M3*5 nuts and screws, 60 needed, 10 for backup
- An arduino controller board
- 60 sets of nuts and bolts for M4*8 screw, used to secure the screw and motor. 50 are needed, 10 are for backup
- Many rolls of PLA plastic, used for 3D printing
- A 3D printer and 3D printing software
Ideally, one should also have a recent version of DS Solidworks.
The design files can be found in the root directory.
The aim of this project is to eventually allow the robot to posesss the ability to run and walk dynamically on flat and tilted surfaces.
Anodroid is now a 12-DOF humanoid-robot. Two have been added on between the foot and shin parts to allow the robot to tilt left and right