The glider toolbox is a set of MATLAB/Octave scripts and functions developed at SOCIB to manage the data collected by a glider fleet. They cover the main stages of the data management process both in real time and delayed time mode: metadata aggregation, data download, data processing, and generation of data products and figures.
The following features are already implemented in the glider toolbox:
- Two main scripts to perform real time and delayed time data processing:
- Two processing functions to perform both modes of data processing:
- Support for different glider models:
- Slocum G1 and G2
- Seaglider
- SeaExplorer
- Deployment metadata gathering from virtually any database.
- File retrieval from multiple dockservers/basestations for real time processing.
- Improved Slocum raw data loading from ascii files (
.dba). - Improved Seaglider raw data loading from ascii files (
.logand.eng). - SeaExplorer raw data loading from ascii files (
.gliand.pld). - Data processing, including:
- unit conversions
- factory calibrations
- corrections, with optional parameter estimation
- derivations
- Data interpolation over instantaneous regular vertical profiles.
- Generation of figure products.
- Generation of NetCDF data products.
- Configuration of every processing stage using configuration files.
- raw data retrieval, storage and load options
- parameters for conversions, calibrations, derivations, corrections, interpolations and filters
- parameters for data gridding
- customizable standard NetCDF product and figure outputs
The following features are planned or in development:
- automatic quality control of processed data.
The toolbox is exhaustively self-documented using the standard documentation
comment system. Hence the help pages are available using the documentation
browser or the help command.
An automatically generated copy of the documentation is available online.
These pages are generated by m2html, and may be built from source
by running make doc from the toolbox top directory.
In addition, the toolbox contains a quick start document to guide users through
the main parts of the installation. It provides an overview of the parts of the
toolbox that are configurable by the user.
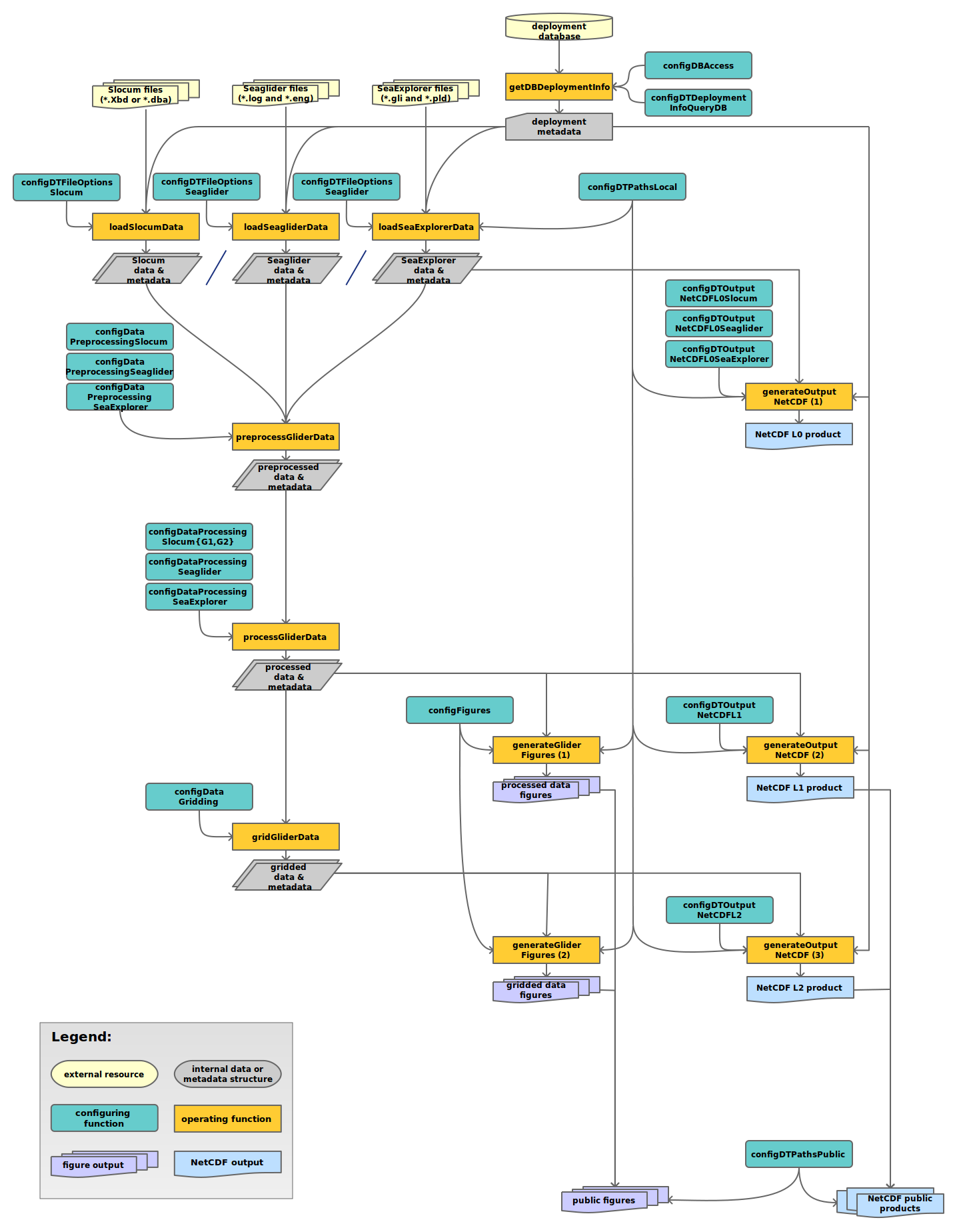
This diagram outlines the flow in the delayed time processing script
main_glider_data_processing_dt. The real time processing
script main_glider_data_processing_rt is similar but
includes steps to retrieve the glider data files from the basestations/dockservers.
The data flow diagram illustrates the different steps of the data
processing of the gliderDataProcessing. It focuses on the real time processing mode
in the sense that it includes the retrieval from the dockserver. However, except
for the initial steps, it also represents the delayed time processing.
{kind=link}
For further details about the processing and its configuration, please refer to the documentation of those scripts (in other words: read the docs! ;-).
Hidden gems
Some common utilities included in the toolbox might be useful even when the burden of an operational set of scripts and functions developed to automatically process the data from a glider fleet is not needed:
- Slocum data file API:
dba2mat,dbacat, anddbamerge - Seaglider data file API:
sglog2mat,sglogcat,sgeng2mat,sgengcat, andsglogenmerge - SeaExplorer data file API:
sx2mat,sxcat, andsxmerge - More convenient NetCDF interface:
loadncandsavenc - RFC-compliant JSON interface:
loadjsonandsavejson - C-style character array conversion:
strc - String formatting of scalar structs:
strfstruct - SFTP interface compatible with native FTP:
sftp
Contributions and criticism are welcome.
If you have any doubt or problem, please fill an issue!
If you fix something or want to add some contribution, many thanks in advance!
A note on style: the MATLAB/Octave code in the toolbox follows these coding style guidelines. If you have your own style don't worry. But if you don't, please consider following them. You may also save some typing using the function and script template helpers there!
This toolbox is based on the previous code developed at IMEDEA and SOCIB by Tomeu Garau. He is the true glider man.
Copyright (C) 2013-2018 ICTS SOCIB - Servei d'observació i predicció costaner de les Illes Balears http://www.socib.es
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.